
Projek ini menerangkan cara motor DC boleh digerakkan ke hadapan atau arah songsang menggunakan alat kawalan jauh TV atau DVD.Matlamatnya adalah untuk membina pemacu motor dua arah mudah yang menggunakan kereta api denyut inframerah (IR) 38kHz termodulat untuk tujuan tersebut tanpa menggunakan sebarang mikropengawal atau pengaturcaraan.
Prototaip pengarang ditunjukkan dalam Rajah 1.

Litar dan berfungsi
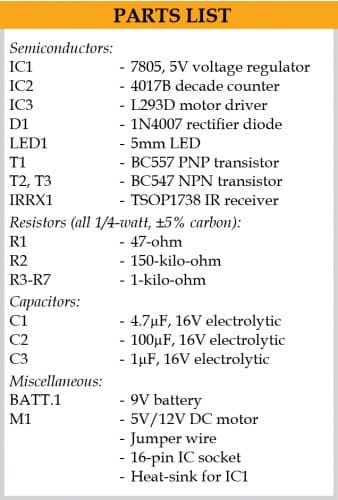
Gambar rajah litar projek ditunjukkan dalam Rajah 2. Ia dibina di sekeliling modul penerima IR TSOP1738 (IRRX1), kaunter dekad 4017B (IC2), pemandu motor L293D (IC3), transistor PNP BC557 (T1), dua transistor NPN BC547 ( T2 dan T3), bekalan kuasa terkawal 5V (IC1), dan bateri 9V.
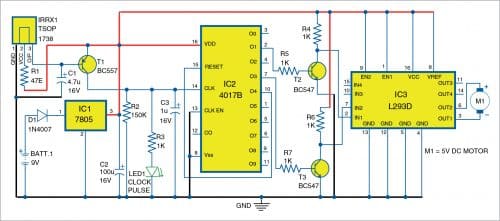
Bateri 9V disambungkan melalui diod D1 kepada pengatur voltan 7805 untuk menjana 5V DC yang diperlukan untuk projek itu.Kapasitor C2 (100µF, 16V) digunakan untuk penolakan riak.
Di bawah keadaan biasa, pin output 3 modul IR IRRX1 berada pada logik tinggi, yang bermaksud transistor T1 yang disambungkan kepadanya terputus dan terminal pengumpulnya berada pada logik rendah.Pengumpul T1 memacu nadi jam bagi kaunter dekad IC2.
Semasa menghalakan alat kawalan jauh ke arah modul IR dan menekan sebarang kekunci, modul menerima denyutan IR 38kHz daripada alat kawalan jauh.Denyutan ini disongsangkan pada pengumpul T1 dan diberikan kepada pin input jam 14 bagi pembilang dekad IC2.
Denyutan IR yang tiba menambah pembilang dekad pada kadar yang sama (38kHz) tetapi kerana kehadiran penapis RC (R2=150k dan C3=1µF) pada pin input jam 14 IC2, rangkaian denyutan muncul sebagai satu nadi pada kaunter.Oleh itu, apabila menekan setiap kekunci, kaunter maju dengan satu kiraan sahaja.
Apabila kunci alat kawalan jauh dilepaskan, kapasitor C3 menyahcas melalui perintang R2 dan garisan jam menjadi sifar.Jadi setiap kali pengguna menekan dan melepaskan kekunci pada alat kawalan jauh, kaunter menerima nadi tunggal pada input jamnya dan LED1 bercahaya untuk mengesahkan bahawa nadi telah diterima.
Semasa operasi terdapat lima kemungkinan:
Kes 1
Apabila kekunci alat kawalan jauh ditekan, nadi pertama tiba dan output O0 bagi pembilang dekad (IC2) menjadi tinggi manakala pin O1 melalui O9 adalah rendah, yang bermaksud transistor T2 dan T3 berada dalam keadaan terputus.Pengumpul kedua-dua transistor ditarik ke keadaan tinggi oleh perintang 1-kilo-ohm (R4 dan R6), jadi kedua-dua terminal input IN1 dan IN2 pemandu motor L293D (IC3) menjadi tinggi.Pada peringkat ini, motor berada dalam keadaan mati.
Kes 2
Apabila kekunci ditekan sekali lagi, nadi kedua yang tiba di garisan CLK menambah satu bilangan.Iaitu, apabila nadi kedua tiba, output O1 IC2 menjadi tinggi, manakala output selebihnya rendah.Jadi, transistor T2 mengalir dan T3 dipotong.Ini bermakna voltan pada pengumpul T2 menjadi rendah (IN1 daripada IC3) dan voltan pada pengumpul T3 menjadi tinggi (IN2 daripada IC3) dan input IN1 dan IN2 pemandu motor IC3 masing-masing menjadi 0 dan 1.Dalam keadaan ini, motor berputar ke arah hadapan.
Kes 3
Apabila kekunci ditekan sekali lagi, nadi ketiga yang tiba di garisan CLK menambah satu lagi kaunter.Jadi output O2 IC2 menjadi tinggi.Oleh kerana tiada apa-apa yang disambungkan kepada pin O2 dan pin output O1 dan O3 adalah rendah, jadi kedua-dua transistor T2 dan T3 pergi ke keadaan terputus.
Terminal pengumpul kedua-dua transistor ditarik ke keadaan tinggi oleh perintang 1-kilo-ohm R4 dan R6, yang bermaksud terminal input IN1 dan IN2 IC3 menjadi tinggi.Pada peringkat ini, motor berada dalam keadaan luar.
Kes 4
Apabila kekunci ditekan sekali lagi, nadi keempat yang tiba di garisan CLK menambah satu kaunter untuk kali keempat.Sekarang output O3 IC2 menjadi tinggi, manakala output selebihnya rendah, jadi transistor T3 mengalir.Ini bermakna voltan pada pengumpul T2 menjadi tinggi (IN1 daripada IC3) dan voltan pada pengumpul T3 menjadi rendah (IN2 daripada IC3).Jadi, input IN1 dan IN2 IC3 masing-masing berada pada tahap 1 dan 0.Dalam keadaan ini, motor berputar dalam arah terbalik.
Kes 5
Apabila kekunci ditekan untuk kali kelima, nadi kelima yang tiba di garisan CLK akan menambah satu lagi kaunter.Memandangkan O4 (pin 10 IC2) disambungkan ke Tetapkan semula pin input 15 IC2, menekan untuk kali kelima membawa IC pembilang dekad kembali kepada keadaan hidupkan semula dengan O0 tinggi.
Oleh itu, litar beroperasi sebagai pemandu motor dua arah yang dikawal dengan alat kawalan jauh inframerah.
Pembinaan dan ujian
Litar boleh dipasang pada Veroboard atau PCB yang susun atur saiz sebenar ditunjukkan dalam Rajah 3. Susun atur komponen untuk PCB ditunjukkan dalam Rajah 4.
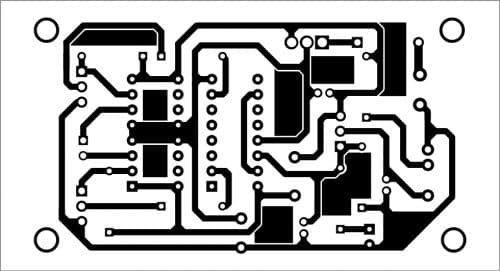
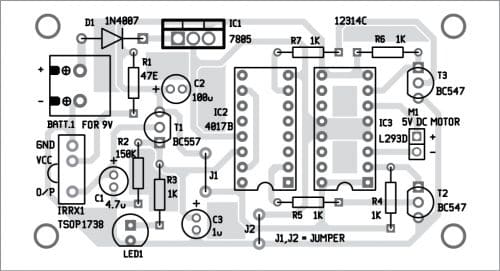
Muat turun PCB dan PDF susun atur Komponen:tekan di sini
Selepas memasang litar, sambungkan bateri 9V merentasi BATT.1.Rujuk Jadual Kebenaran (Jadual 1) untuk operasi dan ikuti langkah yang diterangkan dalam Kes 1 hingga Kes 5 di atas.
Disunting oleh Lisa
Masa siaran: Sep-29-2021